")
フライトシミュレーターでジェット旅客機の飛行を楽しむ際に、ある程度航空管制について理解していると、ATCを利用して管制に従って飛行することができ、よりリアルな楽しみ方ができます。
月刊エアライン2017年5月号と2019年10月号に航空管制について分かりやすく記載されていたので、いくつかの記事を引用して整理してみました。さらに詳しい情報が知りたい方は月刊エアライン2017年5月号と2019年10月号をお読みください。
航空管制の役割分担 항공교통관제의 역활분담
管制業務の種類 항공교통관제업무의 종류
- 飛行場管制:管制塔から空港近辺を飛行する航空機、滑走路に離着陸する航空機、地上を走行している航空機に対しての管制業務
비행장관제업무(Aerodrome Control Service) : 비행장(공항)을 중심으로 일정범위의 공역(통상 관제권이라 함) 및 공항지상이동지역 내에서 관제탑 관제사에 의해 제공되는 관제업무로서 공항이동지역(Airport Movement Area)의 감시(Surveillance) 및 통제, 이·착륙 및 관제권통과 항공기에 대한 비행허가발부, 항공교통관제허가의 중계 (ATC Clearance Delivery) 등을 포함한다. - 進入管制:空港周辺の空域(進入管制区)を飛行する航空機に対し、進入・出発の順序、経路、方式の指定および上昇・下降等を指示する業務
접근관제업무(Approach Control Service) : 접근관제공역 내를 비행하는 항공기에게 제공하는 관제업무로서, 항공기를 관할하고 있는 책임구역까지 순서를 정하여 유도하는 업무를 말한다. - ターミナル・レーダー管制:レーダーを用いて行なう進入管制業務
터미널 레이더 관제 업무 : 공항 감시 레이더(ASR), 2차 감시 레이더(SSR) 등을 이용하여 공항으로 진입하고 있는 항공기를 유도하거나, 이착륙 간격을 설정해주는 등의 접근관제업무를 말한다. - 着陸誘導管制:着陸する航空機に対し、レーダーを用いて飛行コースと適切な高度を指示し、地上から滑走路への誘導を行なう業務(戦闘機など)
착륙유도관제업무 : 항공교통관제 업무의 하나로 터미널 관제소에서 행하는 것. 계기방식으로 비행하는 항공기에 대하여 레이더로 착륙유도를 행하는 관제업무. - 航空路管制:空港周辺の空域を除く、高い上空を飛行する航空機に対して飛行経路、 高度の指示を行なう業務
지역관제업무(Area Control Service) : 항공로 또는 관할 관제공역(Controlled Airspace)에서 운항하는 항공기에게 관제업무를 제공하는 업무로서, 대한민국에서는 인천에 소재한 항공교통관제센터(ACC)에서 수행한다.

空港の半径9km圏内を受け持つ飛行場管制 비행장관제업무
具体的には、パイロットはまず飛びたいルートや高度をフライトプランとして管制機関に提出する。これは、いわば仮予約である。出発予定時間も申告するが、整備の都合などで出発が遅れることもある。そこで実際に乗客が搭乗して出発準備が整ったならば、管制塔のクリアランスデリバリー席の航空管制官に「エンジンスタート5分前」を通告する。これを受けたクリアランスデリバリー席は、そのルートの交通状況を見ながら飛行ルートや高度を承認する。
조종사들은, 출발 전 출발비행장의 항공교통업무보고 취급소에 비행계획서를 제출한다. 이것은 출발 예정 시간을 통해 임시로 항공로를 예약하는 것과 비슷하다. 하지만 정비 등 항공사나 승객의 사정으로 출발이 지연 될 수 있기 때문에, 실제로 승객이 탑승해 출발 준비가 완료되었을 때, 관제탑으로부터 항공교통관제허가(Air Traffic Control Clearance)를 받는다.
これが本予約に相当する。空の一角が、その航空機のために確保されたのである。「次いでパイロットはグランド席にプッシュバックと、さらに滑走路までの移動を要請して許可を得る。そして滑走路手前まで来たところでローカル席(タワー)と交信し、離陸許可を得る。もちろん到着機がいる場合には滑走路手前で待つことになるし、出発機が続いている場合には空中での安全な間隔を維持できるように離陸のタイミングが計られる。
이것으로 예약이 확정된 것과 같다. 일정 시간의 항공로의 일부분이 예약한 항공기에 확보된 것이다. 계속해서 조종사는 관제탑의 지상관제사(Ground Controller)에게 지상 후방견인(일명 푸시백이라 함)을 요구하며 지상이동허가를 받은 후, 이륙을 위하여 관제사가 지정한 활주로까지 이동(Taxi Out) 한다. 활주로 바로 앞까지 왔을때, 조종사는 관제탑의 국지관제사(Local Controller)로부터 이륙허가를 받은 후 활주로에서 이륙한다.
ターミナル・レーダー管制、 航空路管制へと引き継ぎ
飛行場管制が行なわれるのは半径9kmの管制圏であり、離陸した航空機はすぐにそこを飛び出してしまう。そこでローカル管制官は離陸を見届けるとターミナル・レーダー制のデパーチャー席に管制を引き継ぐ。ディパーチャー席は管制塔ではなくレーダー管制室におり、レーダーモニターで航空機の動きを監視しながら航空路まで誘導する。通常はIFR機のために定められたSIDという出発経路に沿って上昇するが、これは多くの航空機を安全に導くために設けられたものなので、余裕があるときには近道が許可されることもある。
비행장관제업무는 비행장(공항)을 중심으로 일정범위의 공역(통상 관제권이라 함, 일본에서는 반경 9km)에서 이루어지기 때문에, 이륙한 항공기는 바로 관제권 밖으로서 벗어나게 되는데, 이 때 비행장관제사는 이륙하는 모습을 관제탑에서 목격하면서 접근관제로 이양한다. 접근관제업무는 레이더를 이용하여 항공기의 움직임을 감시하며, 항공교통센터에서 관할하는 항공로까지 유도한다.

空港から100kmほど離れると、次は航空路管制に引き継がれる。日本では札幌、東京(所沢)、福岡、那覇という45の航空交通管制所で航空路管制が行なわれており、それぞれに担当の空域が分けられている。また同じ管制部の空域も、さらに小さな空域(セクター)に分けられており、そこを通過するたびに担当の航空管制官も変わる。そして目的地空港が近づいてきたならば、航空管制官の指示で高度を下げ、目的空港のターミナルレーダー管制(アプローチ席)に引き継がれる。ここでもし同じ空港に着陸しようとする航空機が複数あった場合には、アプローチ席が両者の間隔が適正に保たれるように誘導し、最終進入コースで空港のローカル席に引き継ぐ。そしてローカル席の許可を得て着陸したならば、滑走路を出てグランド席に引き継がれ、スポットまでタキシングする許可を得る。
공항에서 100km 정도 벗어나면, 이번에는 지역관제로 이양한다. 일본에서는 삿포로, 도쿄, 후쿠오카, 나하 등 45개 항공교통관제센터에서 지역 관제가 이루어지고 있으며, 각각 담당 공역이 분리되어 있다. 하나의 관제센터의 공역은 더 작은 공역(섹터)으로 나눠져 있고, 그곳을 지날 때마다 담당 관제사도 바뀐다. 항공로상을 비행한 항공기가 목적공항 부근에 도착하면 항공교통센터의 관제업무가 종료되고 접근관제업무를 받으면서 강하한다. 같은 공항에 착륙하려는 항공기가 다수 있었을 경우에는 관제사가 항공기의 간격이 적절하게 유지되도록 유도하여, 조종사가 시각으로 비행장을 볼 수 있거나, 최종 진입코스에 도달하면 접근관제업무가 종료되고 비행장관제로 이양된다. 관제사의 허가를 받아 착륙하면 활주로를 나와 지상관제사에 이양되어 지상이동허가를 받는다.
航空路の種類

約2万9000ftより高度は RNAV航空路
航空路の進歩は、航法装置の進歩と密に関連している。戦後の日本ではまずNDBが、続いてVORが整備されるようになった。VORの方が精度が高いが、地上局や機上の受信機が高価だったため一気には導入はできない。そこで航空路の更新もVOR受信機の普及をみながら進められた。
항공로의 발전은 항법장치의 발전과 밀접한 관련이 있다. 전후 일본에서는 우선 NDB(무지향성 무선표지, non-directional radio beacon)가 보급되고, VOR(초단파 전방향 무선표지, VHF Omni(directional) Range)가 나중에 보급되었다. VOR가 정밀도가 높지만, 장비가 고가였기 때문에 단번에 도입 할 수 없었다. 항공로의 갱신도 VOR의 보급에 맞춰서 진행되었다.
航空路用NDB局は1970年代に最大31局を数えたあと、VOR局の整備と共に減少して現在は廃止。航空路用VOR局は1990年代に最大52局を数えたが、現在はGPSなどを使うRNAV航法の普及とともに数を減らしつつある。
항법용 NDB는 1970년대에 최대 31개소가 설치되었지만, VOR의 보급과 함께 감소해 현재는 폐지, 항법용 VOR은 1990년대에 최대 5개소가 설치되었지만, 현재는 GPS등을 사용하는 RNAV 항법의 보급과 함께 점점 폐지되고 있다.

VORは便利な装置だが、地上局を結ぶようにしか航空路を設定できないので経路がギザギザになって飛行距離が長くなる。また2つの地上局を結ぶ航空路は1本しか設定できないので、交通量の増大に対応しにくい。それに対してRNAV航空路は、地上局の位置に関わらず自由に設定が可能で、しかも精度が高いので航空機の間隔をより小さくすることができる。
VOR는 편리한 장비이지만 지상의 송신국을 연결하여 항공로를 설정하기 때문에 비행 경로가 들쑥날쑥해지며 비행거리가 길어진다. 또 2개의 송신국을 연결하는 항공로는 하나밖에 설정할 수 없기 때문에, 교통량 증가에 대처하기 어렵다. 그에 비해 RNAV 항공로는 지상의 송신국의 위치에 관계없이 자유롭게 설정이 가능하고, 더욱이 정밀도도 높기 때문에 항공기의 간격을 보다 좁게 할 수 있다.
ただし現状ではまだRNAVの装備がない古い航空機もありため、こうしたRNAV非対応機がいる場合には、従来通りの間隔が適用される。つまり、こうしたRNAV非対応機が混在しているようでは、空域をうまく活用できないことになる。
다만 현재로서는 아직 RNAV 장비가 없는 오래된 항공기도 있기 때문에 이러한 RNAV 비대응 기체가 있는 경우에는 기존과 같은 간격이 적용된다. 즉, 이러한 RNAV 비대응 기체가 혼재하고 있는 한, 공역을 잘 활용할 수 없게 된다.
そこで現在の日本の上空では、FL290(高度約2万9000ft)を境に、上空をRNAV航空路、低空を従来通りのVOR航空路として、RNAV対応機とRNAV非対応機の空域を分けている。ジェット機は空気の薄い(空気抵抗が小さい)高い高度ほど効率がよくなるが、そうした高高度を「スカイハイウェイ」としてRNAV対応機専用にしたのである。
이러한 문제를 해결하기 위해서 현재의 일본 상공에서는, FL290(고도 약 2만 9000ft)를 경계로, 상공을 RNAV 항공로, 저공을 종래대로의 VOR 항공로로 나눔으로서 RNAV 대응기체와 RNAV 비대응기체의 공역을 나누고 있다. 제트기는 공기가 얇은(공기 저항이 작은) 높은 고도일수록 효율이 좋아지는데, 이러한 높은 고도를 「스카이 하이웨이」로서 RNAV 대응기체 전용으로 했던 것이다.

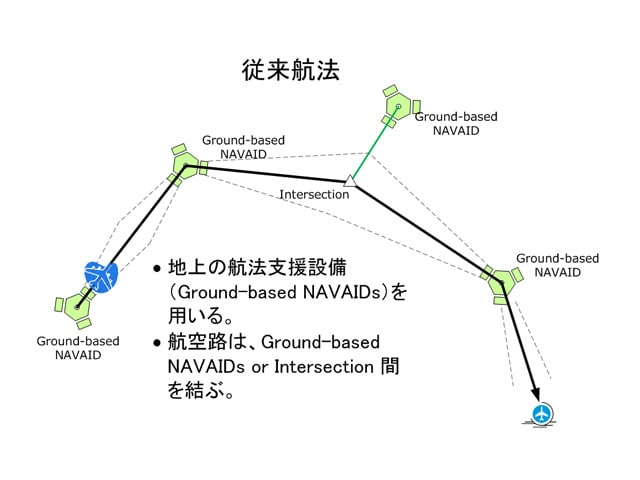
無線標識同士を結ぶ かつての主流ルート VORルート(VHF Omnidirectional Range Route)
現在、日本で使われている主な航空路には、利用する航法の手段によってVORルートとRNAVルートとがある。
현재 일본에서 사용되고 있는 주된 항공로에는, 이용하는 항법의 수단에 의해서 VOR 항공로와 RNAV 항공로가 있다.
航空路は目には見えないため、そこを正しく飛ぶためには航法装置が必要になる。そのうち、VORを使って飛ぶのがVORルートだ。VORは、地上局から発信する電波を受信することで、航空機がどの方向にいるかを示す。
항공로는 눈에 보이지 않기 때문에 그곳을 제대로 날기 위해서는 항법장치가 필요하다. 그중 VOR를 통해 비행하는 것이 VOR 항공로이며, 통상 2개의 VOR을 연결한 선상에 설정된 항공로이다. VOR는 지상의 송신국에서 발신하는 전파를 수신함으로써 항공기가 어느 방향으로 비행하고 있는지 알 수 있다.

たとえば、あるVOR局から036度の方向(反対向きは216度)に伸びる航空路が設定されていたとする。この航空路を飛ぶためには、機上の受信機をそのVOR局の周波数に合わせ、飛行したい航空路の方位(この場合は036度あるいは216度)にセットしてやればよい。すると計器に、自分がそこからどちらにずれているかが表示されるため、そのずれがないように飛べばよい。それがVOR航法の基本だ。
예를 들어 어느 VOR으로부터 036도의 방향(반대방향은 216도)으로 뻗은 항공로가 설정되어 있었다고 하자. 이 항공로를 비행하기 위해서는 기체에 장비되어 있는 수신기를 해당 VOR의 주파수에 맞추어 비행하고자 하는 항공로의 방위(이 경우는 036도 혹은 216도)에 맞추면 된다. 그러면 계기에, 자신이 항공로로부터 어느 쪽으로 어긋나 있는지가 표시되기 때문에, 어긋나지 않도록 비행하면 항공로를 따라 비행하게 된다. 이것이 VOR 항법의 기본이다.

VORは便利なので、一時は航法装置の主流となった。しかし、地上のVOR局を結ぶようにしか航空路を設定できないため、設定できる航空路の数が限られるし、そうした航空路が集中するVOR局の上空は「交差点」のように航空機が集中してしまうことになる。また、遠く洋上のようにVOR局の電波が届かないところでは利用できない。
VOR은 편리하여 한때 항법장치의 주류를 이루었다. 그러나, 지상의 VOR 송신국을 연결하는 것으로 밖에 항공로를 설정할 수 없기 때문에, 설정할 수 있는 항공로의 수가 한정되고, 항공로가 집중하는 VOR 송신국의 상공은 “교차로”와 같이 항공기가 집중해 버리게 된다. 또 육지에서 멀리 떨어져 있는 해상의 상공과 같이 VOR 송신국의 전파가 닿지 않는 곳에서는 이용할 수 없다.
航空会社の主流となった自由かつ効率的なルートRNAVルート(広域航法、Area Navigation Route)
道路を走る車と違い、空を飛ぶ飛行機は自機の位置や目標からの距離を何らかの方法で知る必要がある。今までは地上のVOR局やNDB局、さらにDME局などを利用してナビゲーションが行なわれていたが、GPSの発達や、それに対応する航空機搭載型GPS航法装置の発達により、「RNAV(Area Navigation=広域航法/アールナブと読む)」という、自機の位置と次の地点へのコースなどを算出・表示する航法が可能となった。
도로를 달리는 자동차와 달리 하늘을 나는 비행기는 자신의 위치나 목적지로부터의 거리를 어떤 방법으로든 알아야 한다. 지금까지는 지상의 VOR국이나 NDB국, 또한 DME국 등을 이용한 항법을 사용하고 있었지만, GPS의 발달과 GPS에 대응하는 항공기 탑재형 GPS 항법 장치의 발달에 의해, 「RNAV (Area Navigation, 지역항법)」라고 하는, 자기의 위치와 다음의 지점에의 할로 등을 산출하고 표시하는 항법이 가능해졌다.
主にGPSなどのGNSS(衛星測位システム)を利用することで、地上局に依存することなく、世界中のいかなる場所でも高い精度での測位が可能だ。
주로 GPS(Global Positioning System, 위성위치 측정 시스템)등의 GNSS(Global Navigation Satellite System, 위성항법시스템)를 이용함으로써, 지상국에 의존하는 일 없이, 전 세계의 어떠한 장소에서도 높은 정밀도로의 위치 측정이 가능하다.
地上局に依存することがないから、航空路は自由に設定することができるし、精度が高いから航空路の幅を狭くすることができる。つまり、限られた空間により多くの航空路を設定できる(より多くの航空機を飛ばすことができる)。
지상국에 의존하지 않기 때문에, 항공로를 자유롭게 설정할 수 있고, 정밀도가 높기 때문에 항공로의 폭을 좁힐 수 있다. 즉, 한정된 공역에 더 많은 항공로를 설정할 수 있다(보다 많은 항공기를 운항 할 수 있다).
ただしRNAV航空路なら何でも高精度というわけではなく、実際には航法精度によってさまざまな規格がある。航法精度の規程がない場合には航空路の横間隔は20nm(約37km)となるが、航法精度±5nmのRNAV5では10~15nm(約18~28km)となり、さらに航法精度±2nmのRNAV2では8~10nm(約15~19km)となる。
다만 RNAV 항공로라면 뭐든지 고정밀이라는 것은 아니고, 실제로는 항법 정밀도에 의해서 여러가지 규격이 있다. 항법 정밀도의 규정이 없는 경우의 항공로 폭은 20 nm(약 37 km)가 되지만, 항법 정밀도±5nm의 RNAV5에서는 10~15 nm(약 18~28 km)가 되고, 더욱이 항법 정밀도±2 nm의 RNAV2에서는 8~10 nm(약 15~19 km)가 된다.
いずれにせよGNSSだけ頼るのは危険なので、RNAVで飛行する航空機は他の方法でも常に位置を確認したり、測位精度を検証するようになっている。よく使われているのは地上局からの位置を示すDME(距離測定装置)で、複数のDME局からの距離がわかれば自分の位置を正確に知ることができる。そのための計算は手動では煩雑だが、航空機に搭載されたコンピューターを使えば瞬時に、連続的に正確な位置を測定することができる。また日本の上空はすべて航空路監視レーダーでカバーされており、航空管制官がそれぞれの航空機の間隔やコースの逸脱がないように見守っている。
어쨌든 GNSS에만 의지하는 것은 위험하므로 RNAV로 비행하는 항공기는 다른 항법으로도 항상 위치를 확인하거나 위치 측정의 정확도를 검증하도록 돼어 있다. 자주 사용되고 있는 것은 지상국으로부터의 위치를 나타내는 DME(거리 측정 장치)로, 복수의 DME국으로부터의 거리를 알면 자신의 위치를 정확하게 알 수 있다.이를 위한 계산은 인간이 하려면 복잡하지만 항공기에 탑재된 컴퓨터를 사용하면 순식간에 연속적으로 정확한 위치를 측정할 수 있다. 또 일본 상공은 모두 항공로 감시레이더 역역 안에 있어 항공관제사가 각 항공기의 간격이나 항로에서 벗어나지 않도록 지켜보고 있다.
1,000フィートの高度差ごとの ルート管理 RVSM(短縮垂直間隔、Reduced Vertical Separation Minimum)
精度の高いRNAVによって航空機の水平間隔(前後左右間隔)を狭め、限られた空域により多くの航空機が飛べるようになった。さらに垂直間隔(高度差)も狭めて、もっと多くの航空機を飛ばせるようにするのがRVSM(短縮垂直間隔)だ。
정밀도가 높은 RNAV에 의해서 항공로의 폭을 좁혀 한정된 공역에 더 많은 항공기를 수용할 수 있게 되었다. 여기에 항공기간 수직 분리 적용치를 줄여서 한 영공안에 더욱 많은 항공기를 수용할 수 있게 하는 것이 RVSM (Reduced Vertical Separation Minimum, 수직 분리 축소) 이다.
これは高度計や高度を維持するための装置(オートパイロット)などの性能向上によって可能になったもので、日本ではFL290からFL410の高度帯において、垂直間隔が従来の2,000フィートが1,000フィートに短縮されている。
이는 RVSM 공역을 운항하는 항공기의 고도를 유지하는데 필요한 장비의 성능향상으로 가능하게 된 것으로, 한국에서는 FL290 ~ FL400 사이 고도에서 비행하는 항공기간의 최소분리기준을 현행 기준인 2000ft에서 1000ft로 줄여서 운영하고 있다.

日本と北米を結ぶ洋上の基本5ルート NOPACルート(北太平洋ルート、North Pacific Route)
洋上のようにレーダーの電波が届かないところにも、航空路は設定されている。代表的なのは、日本(アジア)と北アメリカを結ぶNOPAC(北太平洋)ルートだ。これは固定された航空路で、日本とアメリカ西海岸を最短距離で結ぶ大圏ルートを基本に5本が設定されている。
바다 위처럼 레이더 전파가 닿지 않는 곳에도 항공로가 설정돼어 있다. 대표적인 것은 일본 상공에서 북태평양 상공을 거쳐 북미 대륙 서부 등으로 연결되는 NOPAC(북태평양) 항로이다. 이는 일본과 미국 서해안을 최단거리로 연결하는 대권 항로(great-circle route)로 5개의 로선이 설정되어 있다.
旅客機が、その航空路上のどこを飛んでいるかを航空管制官が知るためには、かつてはパイロットが無線で行なうポジションレポート(位置報告)に頼っていた。しかし、現在は多くの旅客機がADS(自動位置情報伝送・監視装置)を装備しており、航法装置から得られた位置情報を人工衛星経由で自動的に地上に送信するようになっている。
여객기가 항공로의 어디를 비행하고 있는지 관제사가 파악하기 위해서는, 이전에는 항공기 조종사가 무선으로 실시하는 위치보고(Position Reporting)에 의지하고 있었다. 그러나 현재는 많은 여객기가 방송형자동종속감시(ADS) 시스템을 장비하고 있어 항법장치로부터 얻은 위치정보를 인공위성을 통해 자동적으로 지상에 송신하게 돼어 있다.

さまざまな運航条件に対応する 最適ルート PACOTS(太平洋編成経路システム、Pacific Organized Track System)、UPR(利用者設定経路、User Preferred Route)、DARP(動的飛行経路変更方式、Dynamic Airborne Reroute Procedure)
航空機は風の影響を受けやすいため、必ずしも最短ルート(大圏ルート)が最適ルートとは限らない。そこで、管制機関が気象状態や空域の運用状況などを考慮して、毎日新しく設定している(つまり毎日変わる)航空路がPACOTS(太平洋編成経路システム)だ。航空会社は、前項のNOPACあるいはPACOTSのどちらかを選ぶことができる。
항공기는 바람의 영향을 받기 쉽기 때문에 반드시 최단 루트(대권 항로)가 최적의 항로라고는 할 수 없다. 항공교통관제기관이 기상 상태나 공역의 운용 상황 등을 고려하여, 매일 새롭게 설정하고 있는 (즉 매일 바뀌는) 항공로가 PACOTS (Pacific Organized Track System)다. 항공사는 앞서 설명한 NOPAC 또는 PACOTS 중 하나를 선택할 수 있다.
さらに航空会社が自社の航空機の性能や離陸重量などを加味して自分で航空路を設定することがあり、これをUPR(利用者設定経路)という。NOPACやPACOTS、UPRのいずれにしても、出発前にルートを決め、それを航空管制官に承認されて飛ぶ。離陸したあとは、基本的には承認された通りのルートを飛ぶが、現在ではDARP(動的飛行経路変更方式)といって、飛行中にさらに効率のよいルートへの変更を要求するという運用も開始されている。
여기에 더해서, 항공사가 자사의 항공기 성능과 이륙 중량 등을 고려해 스스로 항공로를 설정하는 경우가 있어 이를 UPR (User Preferred Route) 이라고 한다. NOPAC나 PACOTS, UPR 중 어느것이든지, 출발전에 항공로를 결정해 관제사의 승인을 받는다. 이륙한 후에는 기본적으로 승인된 항공로를 따라 날지만, 현재는 DARP (Dynamic Airborne Reroute Procedure)라 하여 비행중인 항공기에 최적의 항공로로를 반영하는 운용도 개시되고 있다.
従来でも、例えば予定コース上に雷雲などがある場合には許可を受けて避けるということはあったが、そのあとは元のコースに戻るというのが基本だ。いわば、工事中の場所を一時迂回して元の道に戻るようなものだ。それに対して、DARPは航空会社のディスパッチャー(運航管理者)が航空機の出発後も最新の気象状況などをチェックし、より効率のよいルートがあればパイロットに伝えて改めて管制機関からの承認を受ける。つまり迂回ではなく、別の経路に切り替えてしまうというのが違いである。
종래에도, 예를 들면 예정 항공로상에 뇌운등이 있을 경우에는 관제사의 허가를 받아 피하는 것은 있었지만, 피한 다음에는 원래의 항공로로 돌아오는 것이 기본이다. 이른바 공사 중인 곳을 일시 우회해 원래의 길로 되돌아가는 셈이다. 그에 비해, DARP는 항공사의 운항관리자가 항공기의 출발 후에 최신의 기상 상황등을 체크해, 보다 효율이 좋은 항공로가 있으면 운항승무원에게 전해 재차 관제기관의 승인을 받는다. 즉 우회가 아니고, 다른 경로로 전환해 버린다고 하는 것이 차이다.

標準計器出発方式(SID)、標準計器到着方式(STAR)、着陸方式(ILS/RNAV/VOR)
SID(標準計器出発方式)

空港からの決められた出発経路である。
旅客機は基本的に計器飛行方式(IFR)で飛ぶが、これは「管制官に見守られながら管制官の指示に従って飛ぶことで、周囲の航空機と安全な間隔を保って飛ぶ方法」という意味だ。
とはいえ管制官も各自バラバラに飛ぶ航空機は監視しきれないため、一定の経路を設定して、その中で機体同士の間隔を保つ。空港からの出発時の道として定められているのがSID(標準計器出発方式)だ。デパーチャーチャートには経由すべきウェイポイント名や座標、それらを結ぶ経路の方位、高度条件等が記されている。在来型ではVOR/DMEなどの航法用地上局を基準に設定されていたが、近年はRNAVの普及でウェイポイントや経路を地上局に縛られずに設定できるようになっている。
STAR(標準計器到着方式)

空港到着時の余裕を持たせた経路である。
空港からの出発時経路がSIDであるのに対し、到着時の経路として設定されているのがSTAR(標準計器到着方式)である。これを記したアライバルチャートにもウェイポイント名や座標、方位、高度などが記されるが、交通量の多い空港ではSIDと比べて遠回りに設定されていることがある。これは到着機の集中時でも処理できる余裕を持たせるためだ。経路が空いている際には管制官のレーダー誘導によるショートカットも可能になる。
当然ながら出発機の経路とは干渉し合わないことが前提なので、その意味でも出ていくだけのシンプルなSIDと、緩やかな経路設定がなされるSTARの関係は合理的なのである。
着陸方式(ILS/RNAV/VOR)

最終進入段階におけるアプローチ情報である。
IFRで飛ぶ到着機には、STARのアライバルチャートに続き、最終計器進入段階を示すアプローチチャートも必要になる。
さらに羽田空港にはVORとセットになったDMEのほかに、ILSごとに滑走路までの距離を示すT-DMEが装備されており、計器進入時に参考にするのはこのT-DMEの数値で、チャートにも明記されている。
NavAids on Cockpit Display
航空機のディスプレイには地上に無線施設として設置されているVOR/DMEや空港のILSなどのほか、GPS座標に設定されたRNAVのフィックスなども表示される。計器の中でどのように描かれているのだろうか。
羽田空港 ILS ZRWY34Lアプローチ中

ILSの電波に正しく誘導されている状態を示すボーイング777のプライマリー・フライト・ディスプレイ(PFD)。グライドスロープ(縦)とローカライザー(限)からのズレを示すデビエーション&スケールがあり、ここにマゼンタ色のダイヤが現在のポジションを示す。滑走路がグリーンで台形上に表示されている。IHAは羽田空港A滑走路BUY34LのILSのIDを示し、ILSのT-DMEから2.4マイルの距離にあることを示している。
高知空港 VOR RWY32アプローチ中

高知空港VORRWY32アプローチを実施。ボーイング737NGのナビゲーションディスプレイ(ND)の下端の表示からVOR1(左)・VOR2(右)ともKRE(高知VOR)にチューンされていることがわかる。VORの3レターの下にはVORまでの距離が表示されていて、KREまで3.2DME離れた位置を飛行中である。グリーンの破線はVORからのラジアルで、737の場合EFISパネルで指定。磁方位161度のアウトバウンドなどを表している。フィックスは手裏剣のような星印で描かれている。
参考文献
- 阿施光南「航空管制の役割分担」『月刊エアライン』、2017年5月号、p.36
- 阿施光南「航空路の種類」『月刊エアライン』、2017年5月号、p.37
- 飛田翔「廃止がすすむ IVORという空の灯台」『月刊エアライン』、2017年5月号、p.42
- かしわひろゆき「標準計器出発方式(SID)、標準計器到着 方式(STAR)、着陸方式(ILS/RNAV/VOR)」『月刊エアライン』、2017年5月号、p.48
- かしわひろゆき「NavAids on Cockpit Display」『月刊エアライン』、2017年5月号、p.51
- 阿施光南「航空路の種類と構造」『月刊エアライン』、2019年10月号、pp.24-25
- 国土交通省「航空管制業務について」、(https://www.mlit.go.jp/common/000164767.pdf:2021/4/20)
- 国土交通省「航空:RNAVロードマップ」(https://www.mlit.go.jp/koku/15_bf_000383.html、2021/4/20)
- 国土交通省「航空機運航のしくみ(レビュー対象の位置づけ)」(https://www.mlit.go.jp/common/001000915.pdf、2021/5/1)
- PAXのひとりごと「RNAV Route って」(https://blog.goo.ne.jp/boeing777-346er/e/27668227583c4869a44bf82373cacbdf、2021/5/1)
- 서울지방항공청「항공교통관제」、(https://www.molit.go.kr/sroa/USR/WPGE0201/m_35744/DTL.jsp:2021/4/20)
- 국토교통부「정책정보」(http://www.molit.go.kr/USR/policyData/m_34681/dtl.jsp?search=&srch_dept_nm=&srch_dept_id=&srch_usr_nm=&srch_usr_titl=Y&srch_usr_ctnt=&search_regdate_s=&search_regdate_e=&psize=5&s_category=p_sec_7&p_category=702&lcmspage=4&id=2502:2021/4/23)
- 네이버 블로그「공항감시레이더(ASR_SSR)」(https://blog.naver.com/rits/103379060:2021/4/20)
- 네이버 지식백과「착륙유도관제업무」(https://terms.naver.com/entry.naver?docId=1647085&cid=50323&categoryId=50323:2021/4/20)
- 네이버 블로그「수직 분리 축소 (RVSM)」(https://blog.naver.com/airbusansks/221967191954:2021/5/12)
- 네이버 블로그「RVSM」(https://blog.naver.com/fly_bx/220296767978:2021/5/12)
- 나무위키「항로」(https://namu.wiki/w/항로:2021/5/12)